 The UCSD Department of Computer Science and Engineering had its first annual award ceremony to highlight outstanding contributions to research, teaching, and diversity at both the graduate and undergraduate levels. Our group won the best research awards at both the undergraduate and graduate level. Pingfan Meng received the graduate research award to cap off an outstanding year in which he won the best paper award at FPL, and continued his stellar research on heterogeneous computing. Antonella Wilby received the undergraduate award; she has also had an eventful year having received a National Geographic Young Explorer Award earlier this academic year. Her work develops technologies for documenting the Vaquita – the worlds most endangered marine mammal.
The UCSD Department of Computer Science and Engineering had its first annual award ceremony to highlight outstanding contributions to research, teaching, and diversity at both the graduate and undergraduate levels. Our group won the best research awards at both the undergraduate and graduate level. Pingfan Meng received the graduate research award to cap off an outstanding year in which he won the best paper award at FPL, and continued his stellar research on heterogeneous computing. Antonella Wilby received the undergraduate award; she has also had an eventful year having received a National Geographic Young Explorer Award earlier this academic year. Her work develops technologies for documenting the Vaquita – the worlds most endangered marine mammal.
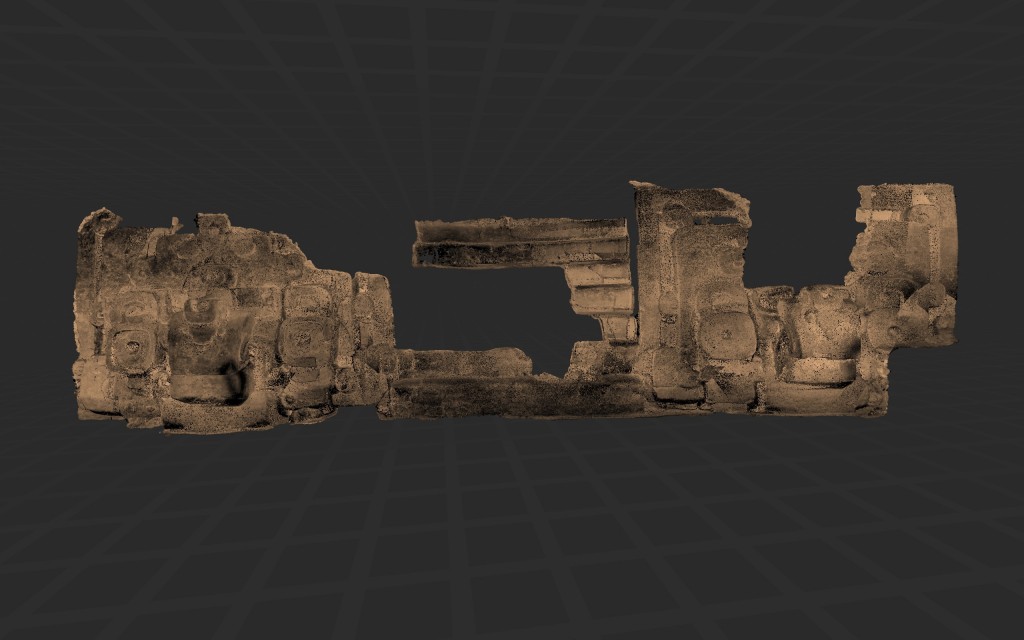
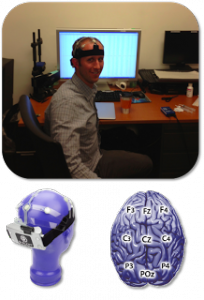
CSE Story The current state of the art in mine detection has people scanning through large sonar images looking for the mines. This is a lot like “Where’s Waldo?”. Many objects look similar to mines, e.g., ripples in the sand. And it is even harder in some ways since the images are blurry and there is noise. Think about looking for Waldo with scratched and blurry glasses. We use computer vision algorithms to first detect potential locations of the mines, but they are not always accurate. These algorithms look for simple patterns, akin to looking for red and white stripes to find Waldo. But they can be tricked if similar patterns occur but they are not mines — just like the illustrators of “Where’s Waldo?” draw other objects with red and white stripes to fool the viewer. Thus, we give all of these potential mine locations from the computer vision algorithm to a human who can then verify if they are indeed mines or some object that looks like a mine. And since we prescreen these images, we can present them in a much faster manner to the human; we did it at 5 images per second by using EEG techniques. This work was recently published in the Journal of Oceanographic Engineering, and was highlighted in the popular press (see links below). The authors are Chris, Alric, Paul DeGuzmann from Neuromatters, and Ryan. Links: UCSD recently announced the awardees for its first offering of the Frontiers of Innovation Scholars Program. The program aims to enhance interdisciplinary research across four strategic research themes – 1) Understanding and Protecting the Planet, 2) Enriching Human Life and Society, 3) Exploring the Basis of Human Knowledge, Learning, and Creativity, and 4) Understanding Cultures and Addressing Disparities in Society. PhD students Quentin Gautier and Alexandria Shearer, and undergraduates Jorge Pacheco, Nathan Hui, Antonella Wilby and Dominique Meyer all received awards. Quentin will work on 3D modeling for underwater archaeology (the picture above shows an underwater cannon in Rockly Bay, Tobago – the site of a large conflict between the French and the Dutch to control Tobago. We created this model using data from collaborating archaeologists); Alex project aims to develop an aerial lidar system for topographic mapping large forested regions specifically to find Maya structures in the jungle; and the undergraduates will work on various projects related to the Engineers for Exploration program. Links: Links: Jacobs School of Engineering Research Expo, Research Expo Poster Abstracts, The picture shows a 3D model of one of the walls of a temple at El Zotz. This is underground, and has been carefully excavated. We created the model using a technique called “structure from motion”. The Maya would adorn the walls of the temple with masks depicting their gods. These ideas are detailed in our upcoming journal paper, “A Brain-Computer Interface (BCI) for the Detection of Mine-Like Objects in Side Scan Sonar Imagery”, that has been accepted as a full article in the Journal of Oceanic Engineering. Congrats are in order to the authors: Christopher Barngrover, Alric Althoff, Paul DeGuzman, and Ryan Kastner. Special thanks to Neuromatters for the support with the EEG analysis tools and to Advanced Brain Monitoring for the use of the EEG sensors and hardware. The picture shows Dr. Chris Barngrover stylishly sporting the EEG cap at Neuromatters in New York City. Links:
Awards Ceremony Video
Posted in Uncategorized
FDA Warns about Security Vulnerabilities
 The Food and Drug Administration recently issued a warning about security vulnerabilities in infusion pumps. Unfortunately, this is likely just the start of such warnings. Clearly the medical device manufacturers need to consider security as a first order design constraint. Ryan and other embedded security experts discusses these issues in a recent article on Healthcare Info Security.
The Food and Drug Administration recently issued a warning about security vulnerabilities in infusion pumps. Unfortunately, this is likely just the start of such warnings. Clearly the medical device manufacturers need to consider security as a first order design constraint. Ryan and other embedded security experts discusses these issues in a recent article on Healthcare Info Security.Faster Mine Detection Using Computer Vision and EEG
 Underwater mines remain a concern for ships around the world. Mines still remain from World War II throughout the Mediterranean Sea, and in the Persian Gulf from Desert Storm and other recent military activities in that region. We developed techniques that combine computer vision with electroencephalogram (EEG) devices to enable the detection of mines in a much better and faster manner.
Underwater mines remain a concern for ships around the world. Mines still remain from World War II throughout the Mediterranean Sea, and in the Persian Gulf from Desert Storm and other recent military activities in that region. We developed techniques that combine computer vision with electroencephalogram (EEG) devices to enable the detection of mines in a much better and faster manner.
Union-Tribune San Diego
ACM TechNews
GCN
UCSD News
UCSD Jacobs School of Engineering News
UCSD CSE News
Product Design and Development
Scientific Computing
ECN Magazine
R & D Magazine
Phys.org
EurekAlertSix Frontiers of Innovation Scholars

UCSD Press Release
UCSD CSE Press Release
Frontiers of Innovation Scholars ProgramDr. Janarbek Matai Defends His Thesis
 Congratulations to Dr. Janarbek Matai on the successful defense of his PhD thesis. His thesis focused on making the hardware design process easier to use, more accessible to programmers, while not sacrificing performance. As one of the foremost experts in high level synthesis, he aimed to automate the knowledge that he has learned by using these state of the art hardware design tools over the past five years. Janarbek will be missed, but is not going far. He will join the research group at Cognex along with former Kastner Group alumni Dr. Ali Irturk and MS alumni Isaac Phillips.
Congratulations to Dr. Janarbek Matai on the successful defense of his PhD thesis. His thesis focused on making the hardware design process easier to use, more accessible to programmers, while not sacrificing performance. As one of the foremost experts in high level synthesis, he aimed to automate the knowledge that he has learned by using these state of the art hardware design tools over the past five years. Janarbek will be missed, but is not going far. He will join the research group at Cognex along with former Kastner Group alumni Dr. Ali Irturk and MS alumni Isaac Phillips. Jacobs School of Engineering Research Expo
 Our group has seven posters in the Jacobs School of Engineering Research Expo this year. The posters cover our research in underwater sensing, hardware acceleration for biomedical applications, real-time 3D reconstruction, and archaeological mapping. The research expo has been a great way for our group to connect with industry. Nik Devreaux from ViaSat provides some insight on this in a recent interview where he mentions his past experiences with our research group related to FPGAS and cyber-security, and the connections with ViaSat.
Our group has seven posters in the Jacobs School of Engineering Research Expo this year. The posters cover our research in underwater sensing, hardware acceleration for biomedical applications, real-time 3D reconstruction, and archaeological mapping. The research expo has been a great way for our group to connect with industry. Nik Devreaux from ViaSat provides some insight on this in a recent interview where he mentions his past experiences with our research group related to FPGAS and cyber-security, and the connections with ViaSat.
Nik Devereau Interview Maya Archaeological Expeditions Highlighted in Triton Magazine
The Triton Magazine covered our research at the Maya archaeological site El Zotz. They focused on our aerial imaging and 3-D reconstructions of the masks and other artifacts both outside the temples and other structures at the site, and within the temples.Sapper Nets “Micro Top Pick” Honorable Mention
 Micro Top Picks are given to the best papers from across the best conferences in computer architecture (ISCA, Micro, ASPLOS, etc.). Our paper, “Sapper: A Language for Hardware-Level Security Policy Enforcement”, received an honorable mention. Congrats to all of the authors: Xun Li (Facebook), Vineeth Kashyap (UCSB), Jason Oberg (UCSD), Mohit Tiwari (UT Austin), Vasanth Ram (UCSB), Ryan Kastner (UCSD), Tim Sherwood (UCSB), Ben Hardekopf (UCSB), and Fred Chong (UCSB).
Micro Top Picks are given to the best papers from across the best conferences in computer architecture (ISCA, Micro, ASPLOS, etc.). Our paper, “Sapper: A Language for Hardware-Level Security Policy Enforcement”, received an honorable mention. Congrats to all of the authors: Xun Li (Facebook), Vineeth Kashyap (UCSB), Jason Oberg (UCSD), Mohit Tiwari (UT Austin), Vasanth Ram (UCSB), Ryan Kastner (UCSD), Tim Sherwood (UCSB), Ben Hardekopf (UCSB), and Fred Chong (UCSB).Automating Underwater Mine Detection Using a Brain-Computer Interface
 It may seem like science fiction, but we showed that it is possible to use sensors to monitor your brain waves and quickly detect underwater mines in sonar images. We combined techniques from computer vision with cutting edge classification of focal interest of human operators via electroencephalography (EEG) analysis, i.e., the recording of electrical activity along the scalp. This is the first approach for using EEG in this application.
It may seem like science fiction, but we showed that it is possible to use sensors to monitor your brain waves and quickly detect underwater mines in sonar images. We combined techniques from computer vision with cutting edge classification of focal interest of human operators via electroencephalography (EEG) analysis, i.e., the recording of electrical activity along the scalp. This is the first approach for using EEG in this application.Ruku the Robot Kickstarter
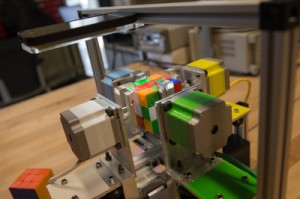 Ruku – a robotic Rubik’s Cube solver – started a Kickstarter campaign. They are aiming to raise funding to develop their robotic platform as a way to motivate K-12 students to participate in science, technology, engineering, and math (STEM). The project was started by Daryl Stimm. He recruited Jonas Kabigting and Will Mutterspaugh to help him realize the project during Ryan’s CSE 145. They are aiming to raise $50,000 which will enable them to move this into larger production. We wish them the best of luck in their fundraising and future endeavors!
Ruku – a robotic Rubik’s Cube solver – started a Kickstarter campaign. They are aiming to raise funding to develop their robotic platform as a way to motivate K-12 students to participate in science, technology, engineering, and math (STEM). The project was started by Daryl Stimm. He recruited Jonas Kabigting and Will Mutterspaugh to help him realize the project during Ryan’s CSE 145. They are aiming to raise $50,000 which will enable them to move this into larger production. We wish them the best of luck in their fundraising and future endeavors!
Ruku Robot Website
Kickstarter page
YouTube Video from CSE 145 Final Presentation
CSE 145 Webpage
UCSD Guardian Article