Our research that shows it is possible to determine the position of underwater vehicles using only ambient ocean sounds was selected as a top pick in the signal processing technical area for the Journal of Acoustical Society of America (JASA). Our algorithm provides a position estimate for underwater vehicles using ambient acoustic ocean noise as recorded by a single hydrophone onboard each vehicle.
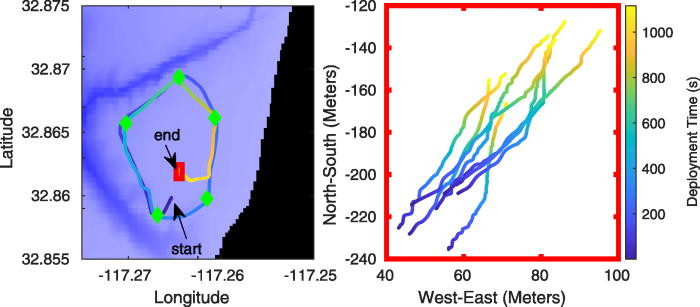
To test our positioning algorithm, we deployed eight underwater vehicles off the coast of San Diego (shown in the red box in the figure). The vehicles are programmed to keep a depth of 6m, but otherwise drift with the ocean currents. The positions derived using only ambient underwater noise was compared with those calculated using an array of acoustic pingers (shown by green diamonds). While the vehicles were drifting, a boat circled the drifting vehicles twice (once at approximately 11 m/s and once at approximately 4 m/s); the trajectory of the boat is shown with the start and end positions indicated. The right panel shows a close up of the AUE trajectories where the red bounding box matches the box on the left panel. Deployment times for both the boat and AUE trajectories are shown by the colorbar on the right. Our position estimates using only the underwater microphones are comparable to the much more complex, difficult to deploy, nad costly localization infrastructure that uses the five buoys.
Our techniques that enable low-cost positioning of underwater vehicles have been documented before. In our previous work, we have shown how to use snapping shrimp for underwater vehicle localization. Here we show how to use other other naturally occurring ocean sounds to perform localization. All of this work, was lead by Dr. Perry Naughton and written up in his PhD thesis.
JASA TECHNICAL AREA PICK: SIGNAL PROCESSING
— JASA (@ASA_JASA) September 17, 2019
"Self-localization of a mobile swarm using noise correlations with local sources of opportunity"
Free through November 30th at https://t.co/aoBVO1m3l9@UCSDJacobs @ResearchUCSD @Scripps_Ocean @UGrenobleAlpes pic.twitter.com/j9WduN1fEX