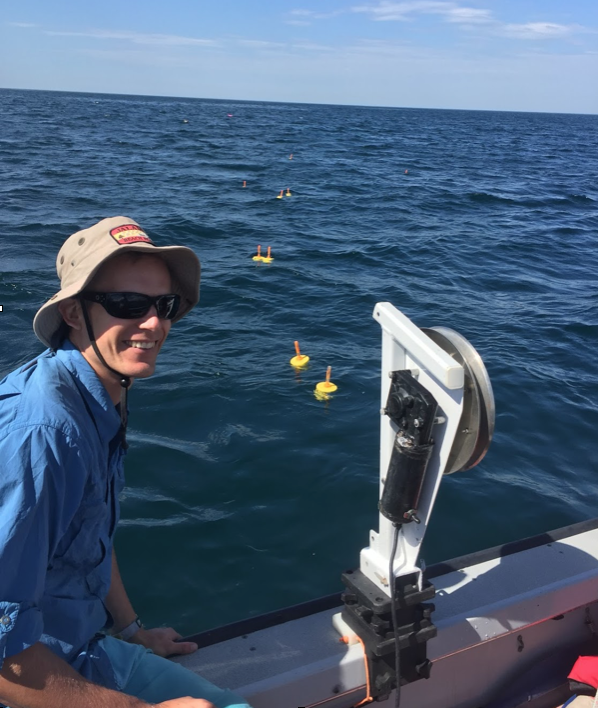
Perry deploying a swarm of Autonomous Underwater Explorers.
Underwater localization is an important yet difficult problem since water severely attenuates the GPS signals — it only propagates very short distances (tens of centimeters) and thus we typically rely on active acoustic solutions to localize underwater vehicles. These require extensive infrastructure (e.g., deploying buoys) or are costly (e.g., a Doppler velocity logger costs thousands of USD). Using ambient noise is attractive since it only requires the vehicles to have a microphone which simple and cheap (only tens of USD). Perry’s research showed that it is possible to estimate the geometry of a swarm of mobile, underwater vehicles with ambient acoustic noise.
Doing this work required a large network of collaborators. Perry worked closely with the Jaffe Lab to use their Autonomous Underwater Explorers to validate his ideas. And he spent a year in Grenoble working closely with Philippe Roux on some of the more theoretical aspects of his research. Additionally, he worked with a number of other scientists as part of Engineers for Exploration and CISA3. His “side projects” involved imaging shipwrecks, scanning archaeological sites, and creating large-scale 3D models of coral reefs.
Perry received a large number of fellowships and awards over the years including the NSF Graduate Research Fellowship, NSF Integrative Training and Research Award, NSF Graduate Opportunities World Wide, Chateaubriand STEM Scholarship (French Embassy), Friends of the International Center Scholarship, ARCS Foundation, and the Henry Booker Prize for Ethical Engineering.
Congrats Dr. Naughton! You’ve had an impressive UCSD career over the past decade (Perry was an undergrad here before doing his PhD). You will be missed, but we look forward to seeing the great things that you will do.